Conference program
Technical program
Best student paper award finalists
Plenary speakers
Elevator pitch sessions and posters
Coffee breaks and lunch
Social events
Technical program
The final scientific program is now available from the PaperCept Conference Management System. You can download the book of abstracts here. Delegates will also receive a printed copy at the conference.
Best student paper award finalists
The AUCC Best student paper award recognises excellence in a paper presented at an Australian Control Conference whose primary author is a student. As part of a greater commitment to promoting, encouraging and training future engineers in Australia, the prize for the best student paper is sponsored by Engineers Australia. The award consists of a certificate and a cheque for AUD $500. Runner ups will be awarded a certificate only.
Ten papers were nominated for the AUCC 2014 Best student paper award. The awards committee chaired by Michael Cantoni (Univ. of Melbourne) and formed by himself, Ian Manchester (Univ. of Sydney) and Daniel Quevedo (Univ. of Newcastle) shortlisted three papers. They are:
-
Finalist: Zhiyong Sun (Autralian National Univ.) Nominator: Brian D.O. Anderson Paper title: Convergence Analysis for Rigid Formation Control with Unrealizable Shapes: The 3 Agent Case Authors: Zhiyong Sun, Shaoshuai Mou, Uwe R. Helmke, and Brian D.O. Anderson -
Finalist: Rahmat Heidari (Univ. of Newcastle) Nominator: Julio H. Braslavsky Paper title: Ultimate Boundedness of Droop Controlled Microgrids with Secondary Loops Authors: Rahmat Heidari, Maria M. Seron, and Julio H. Braslavsky -
Finalist: Shogo Takada (Kanazawa Univ.) Nominator: Osamu Kaneko Paper title: Data-Driven Tuning of Nonlinear Internal Model Controllers for Pneumatic Artificial Muscles Authors: Shogo Takada, Osamu Kaneko, Taiki Nakamura, and Shigeru Yamamoto
The shortlisted papers will be presented by the finalists in the first technical session of the conference, MoAP, Monday November 17, 08:40-09:40, STB S1. The awards committee will base their final decision on both the paper and the oral presentation. The winner will be announced at the conference banquet.
Plenary speakers
MoPP.1, Monday November 17, 17:00-18:00, STB S1
High-Speed Atomic Force Microscopy: Mechatronic Design and Control Challenges
 |
Abstract The Atomic Force Microscope (AFM) is one of the most remarkable scientific instruments to emerge out of the 20th century. Imaging in 3D with atomic resolution is one of the most unique features of the AFM. Unlike traditional light and scanning electron microscopes (SEMs) which create images of matter by measuring the intensity of reflected electromagnetic radiation, the sharp tip of an AFM micro-probe reacts to the sample surface and thus the AFM creates images by mechanically “feeling” the surface with the micro-probe. While the resolution of light microscopy is limited by the refraction of visible light, and SEMs on the diffraction of electron beams, the resolution of the AFM is directly related to the precision and accuracy of positioning the AFM probe relative to a sample surface. Additionally, the throughput of the AFM is limited by how fast the probe can be positioned over the specimen. Increasing the throughput of an AFM while maintaining its high accuracy amounts to a significant challenge. This talk reports on recent efforts to develop video-rate atomic force microscopes for direct observation of dynamic processes at extremely high resolutions by combining innovative mechatronic design and high-performance control. |
Speaker biography
S.O. Reza Moheimani received the Doctoral degree from the University of New South Wales at the Australian Defence Force Academy in Canberra, Australia, in 1996. He joined the University of Newcastle in 1997embarking on a new research program addressing the dynamics and control design issues related to high-precision mechatronic systems. He is the founder and director of the Laboratory for Dynamics and Control of Nanosystems, a multimillion-dollar state-of-the-art research facility. He has published over 300 refereed papers and five books and edited volumes. His current research interests include ultra-high-precision mechatronic systems, with particular emphasis on dynamics and control at the nanometer scale, including applications of control and estimation in nanopositioning systems for high-speed scanning probe microscopy, modeling and control of microcantilever-based devices, control of micro-actuators in microelectromechanical systems, and design, modeling and control of micro-machined nanopositioners for on-chip atomic force microscopy.
TuPP.1, Tuesday November 18, 08:30-09:30, STB S1
A Theory of Information for Nonstochastic Estimation and Control
 |
Abstract Shannon’s probabilistic concept of information is a central tool for delineating fundamental performance limits in communication systems. With the advent of networked control systems, information has also gained renewed appreciation as a concept in control theory, and it is now understood that stochastic control performance is related to the amount of information flowing in the feedback loop. However, unlike in communications, disturbances in control are often modelled as deterministic unknowns with bounded magnitude or power. In such systems, Shannon’s original probabilistic framework is inapplicable. This raises the question of whether it is possible to construct useful analogues of independence, Markovness and information for estimation and control, without having to assume a statistical model. This talk describes a recent framework for doing so, leading to the construction of nonstochastic versions of information and directed information. It is shown that the largest nonstochastic information rate through an error-prone channel coincides exactly with its operational zero-error capacity and, similarly, that the largest nonstochastic directed information yields the operational zero-error feedback capacity. These results lead to tight conditions for estimating or controlling the state of a linear system over an erroneous communication channel, under the requirement of bounded estimation errors or states. The extension to multi-agent systems is then discussed. |
Speaker biography
Girish N. Nair was born in Malaysia and obtained a B.Engineering (Elec., 1st class Hons.) in 1994, B.Science (math.) in 1995, and Ph.D. (elec. eng.) in 2000, on scholarships from the Australian government and the University of Melbourne. He is a professor in the Department of Electrical and Electronic Engineering at the University of Melbourne since 2014, and has previously held visiting positions at the University of Padova (2005), Boston University (2005), and ETH Zürich (2013). His research interests lie in information theory and networked control, and his work has received several prizes, including a SIAM Outstanding Paper Prize in 2006, and the Best Theory Paper Prize at the UKACC International Conference on Control, Cambridge University, 2000. He was an associate editor for the SIAM Journal on Control and Optimization from 2006 - 2011, and has been an associate editor for the IEEE Transactions on Automatic Control since 2011.
Elevator pitch sessions and posters
Please check the information for authors for poster dimensions and instructions for the elevator pitch sessions.
Coffee breaks and lunch
Tea, coffee and light refreshments during coffee breaks as well as lunch on both conference days are included in the conference registration. Delegates will be asked to present their conference name tags as proof of registration. Name tags should be worn at all conference events.
Social events
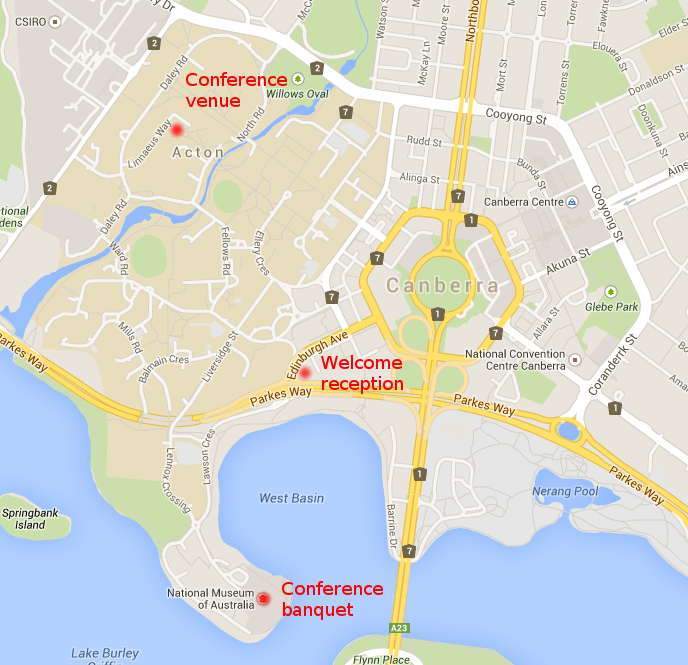
Welcome reception
| Date: | Sunday, 16 November 2014 |
| Time: | 5pm-7pm |
| Venue: | Mosaic Room @ Nishi, 25 Edinburgh Ave, New Acton, Canberra |
| Getting there: | Please make your own way to the venue. See below for an overview map of central Canberra. Click on the map to go to google maps. |
Conference banquet
| Date: | Monday, 17 November 2014 |
| Time: | from 6:30pm |
| Venue: | National Museum of Australia, Lawson Crescent, Acton Peninsula, Canberra |
| Getting there: | See below for an overview map. Click on the map to go to google maps. Conference delegates are invited to join a group walking from the conference venue to the banquet venue (2.2 km through pleasant parkland) directly after close of sessions on Monday, transport by group taxi will be organised on request. |